Research
Please visit the above links to have a more detailed look at our research projects. Below is a list of Centers that we are leading or affiliated with.
NSF MBM at UIUC - Miniature Brain Machinery
NSF STC EBICS at MIT/GT/UIUC - Emergent Behavior of Integrated Cellular Systems
NSF IGERT at UIUC - Cellular and Molecular Mechanics and Bionanotechnology
(download brochure)NIH Training Grant at UIUC - Midwestern Cancer Nanotechnology Training Center
(download brochure)NSF CiiT (I/UCRC) at UIUC - Center for Innovative Instrumentation Technology
NSF NSEC at OSU - Center for Affordable Nanoengineering for Polymeric Micro and Nanodevices
Research:
3D Microfabrication of Biological Machines
Projection Micro Stereolithography
Key Research Aims and Goals
Engineering in vitro model systems that recreate the structure and function of native tissue requires the ability to pattern cells and cell signals at physiologically relevant length scales.
This motivates the development of a 3D printing apparatus capable of patterning celss at high resolution, on the order of single cells (1-50 micron).
Research Highlights and ResultsWe have developed a custom-built projection micro-stereolithography apparatus capable of viably patterning cells encapsulated in hydrogel polymers at resolution < 5 micron.
The ability of this apparatus to fabricate multi-material biological structures with complex 3D designs is being used to target application in tissue engineering of neo-vasculature.
Biological Machines
Key Research Aims and Goals
Using enabling technology of 3D, we can forward engineer multi-functional integrated cellular systems that harness the innate dynamic abilities of cells to self-organize, self-heal, and respond to complex environmental cues.
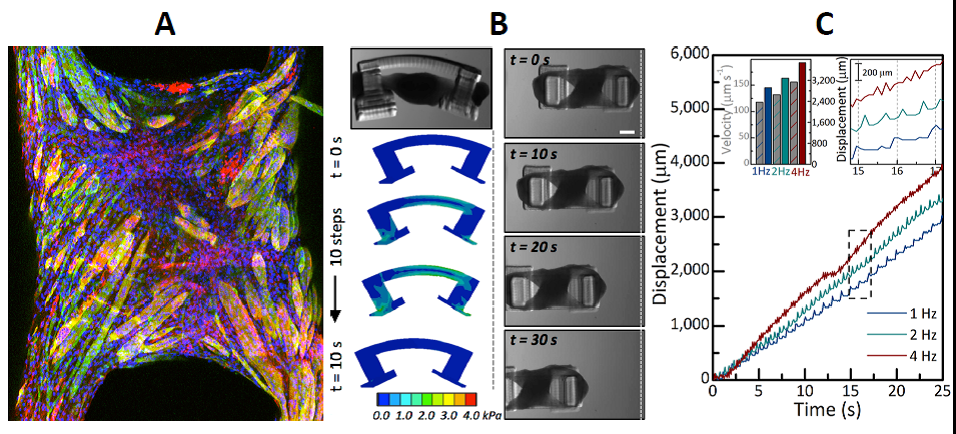
Research Highlights and ResultsWe have developed a skeletal muscle powered biological soft robotic devices or a bio-bot capable of controlled directional locomotion in response to external electrical signals.